Static brake
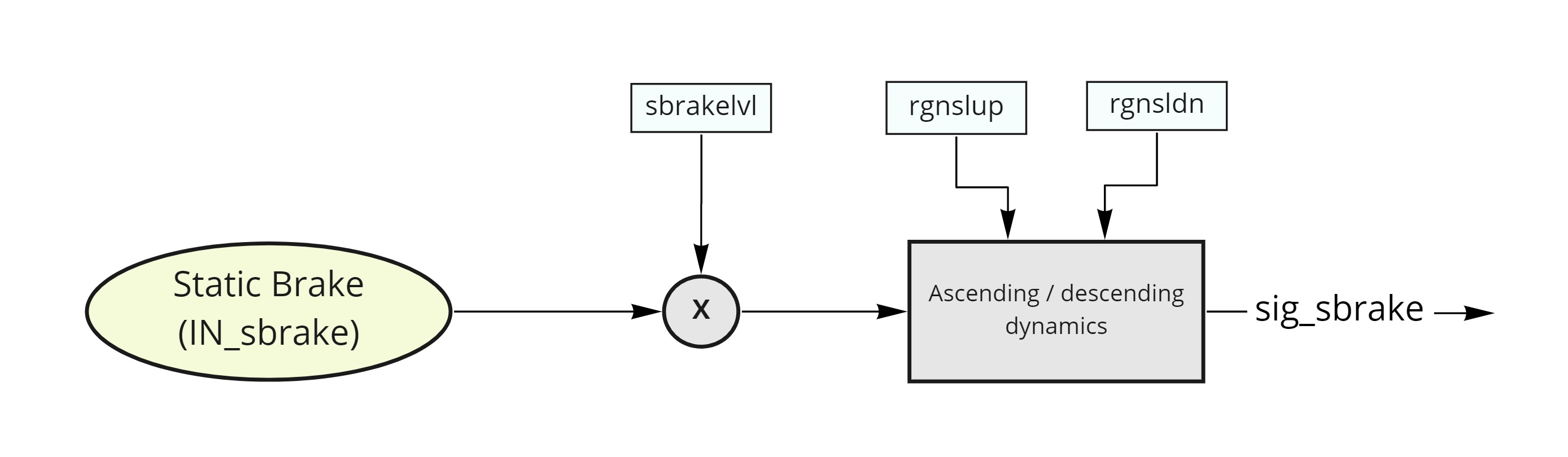
Static brake is a basic braking source. A push button is usually used as an input element. Its output (0 or 1) is then multiplied by the value of parameter sbrakelvl (this allows us to define the maximal braking force of static brake input). There is also the possibility to change the dynamic of the ascending and descending rate of this braking signal by parameters rgnslup and rgnsldn.
Simple signal flow is depicted in the picture below
Configuration steps
Setting static brake input
The LYNX allows you to use different GPIO input pins for the static brake signal. This is done by setting the parameter /io/IN_sbrake to the GDIN ID of the static brake signal.
/io/IN_sbrake value | Input name |
|---|---|
| 16 | GDIN0 |
| 17 | GDIN1 |
| 18 | GDIN2 |
| 19 | GDIN3 |
| 20 | GDIN4 |
| 32 | DIN1 |
| 33 | DIN2 |
| ... | ... |
| 39 | DIN8 |
Check the Input mapping for more information.
You may want to enable pull-up. Check ioconf configuration
Setting the maximum braking force
If the brake is applied, the sbrakelvl is a command to the driver and the /driver/ìrefr is the reference for the phase current. More about braking current reference
The sbrakelvl parameter is located in each map folder (/maps/mapX). Tune this parameter to set maximum braking for each map. More about maps.
If the sbrakelvl is 0, the braking is disabled, but the static brake still disables the throttle. You can disable static brake using the options parameter in the maps folders - More about options.
Tuning the braking response
Using the parameters/brake/rgnslup and /brake/rgnsldn, you can change how fast is the braking applied and released. The value of the parameters is LPF, more about the LPF can be found in the LPF - Low Pass Filter documentation.
- The actual braking signal (only from static brake) is visible in the
/brake/sig_sbrakestate variable. - The actual
sbrakelvlvalue is visible in the/brake/sbrakelvlstate variable.